HEXCRAWLER
| Home |
| Carpentry |
| Classroom |
| Projects |
| Photography |
| Links |
|
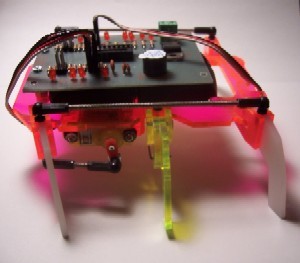
Currently
the HexCrawler is walking around following a predetermined routine.
This is because my infrared sensor has proved to be somewhat
problematic, I am currently working on PicBasic code for the robot
using sonar. The following link is code that I have developed to
work with a Basic Stamp 2.
WALK_AROUND(BS2) |
Last update 8.31.2005
Best viewed at 1024x768 or greater resolution, using mozilla
Developed using Mozilla composer
All images are property of Z. Carrico: Carrico(at)oswego.edu
Validate